Distance Sensor controlled Motor
This tutorial creates a circuit to control a motor with an ultrasonic distance sensor. The greater the distance detected by the sensor, the faster the fan speed.
Motor and sensor code altered from
- https://learn.sparkfun.com/tutorials/sik-experiment-guide-for-arduino—v33/experiment-12-driving-a-motor
- https://learn.sparkfun.com/tutorials/sparkfun-inventors-kit-experiment-guide—v40/circuit-3b-distance-sensor
Components needed:
- 1 - Arduino Uno R3 + USB A-to-B Cable
- 1 - Breadboard
- 10 - Jumper Wires
- 1 - DC Motor
- 2 - 330Ω Resistor
- 1 - LED (any color)
- 1 - NPN transistor
- 1 - Diode 1N4148
- 1 - HC-SR04 ultrasonic distance sensor
- 1 - computer to connect the Arduino to with the Arduino IDE software installed (https://www.arduino.cc/en/software)
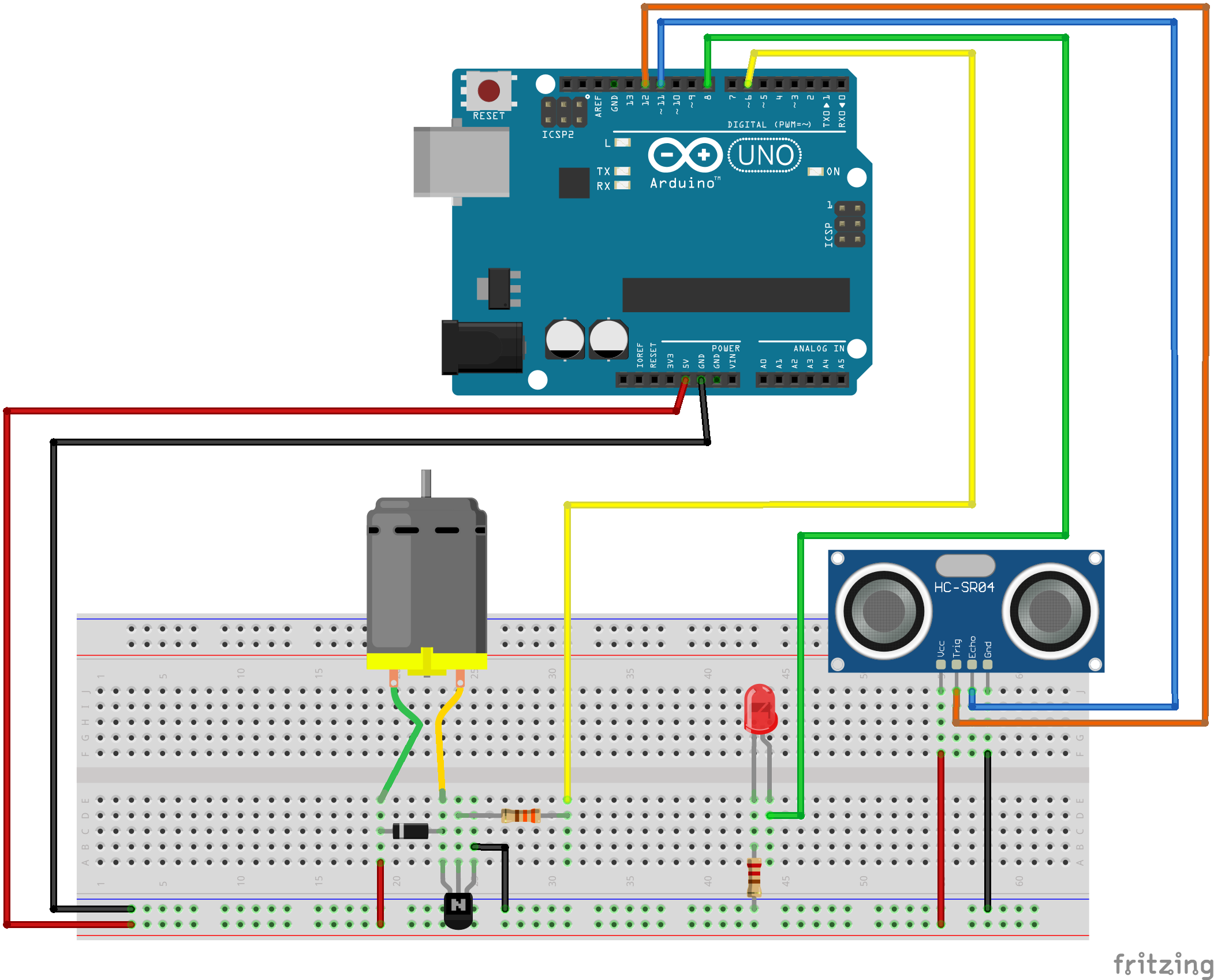
Wiring Diagram
Code
const int motorPin = 6;
const int echoPin = 11;
const int trigPin = 12;
const int ledPin = 8;
float distance = 0;
void setup() {
Serial.begin(9600);
pinMode(motorPin, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
int speed;
distance = getDistance();
Serial.print(distance);
// Serial.println(" in"); // Uncomment for inches
Serial.println(" cm"); // Uncomment for centimeters
//speed = map(distance, 0, 15, 0, 255); // Uncomment for inches
speed = map(distance, 0, 50, 100, 255); // Uncomment for centimeters
speed = constrain(speed, 100, 255);
Serial.print("speed: ");
Serial.println(speed);
analogWrite(motorPin, speed);
delay(500);
}
float getDistance() {
float echoTime;
float calculatedDistance;
// Make sure transmission pin is turned off first
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
//send out 10ms ultrasonic pulse
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
echoTime = pulseIn(echoPin, HIGH);
//half the bounce time multiplied by the speed of sound
//calculatedDistance = echoTime / 148.0; // Uncomment for inches
calculatedDistance = echoTime / 58.2; // Uncomment for centimeters
return calculatedDistance;
}