Photoresistor + Servo
Scholars’ Lab Arduino Tutorials
Example Sketch 05
Change the position of a servo motor based on the amount of light.
This sketch uses code from SparkFun Electronics sketches for example circuit 6 and 8, version 2.0 6/2012/ MDG This code is completely free for any use.
Visit http://learn.sparkfun.com/products/2 for SIK information.
Visit http://www.arduino.cc to learn about the Arduino.
Hardware
- Arduino
- Photo resistor: https://www.adafruit.com/products/161
- Servo motor: https://www.sparkfun.com/products/9065
- 10KΩ Resistor: https://www.adafruit.com/products/2784
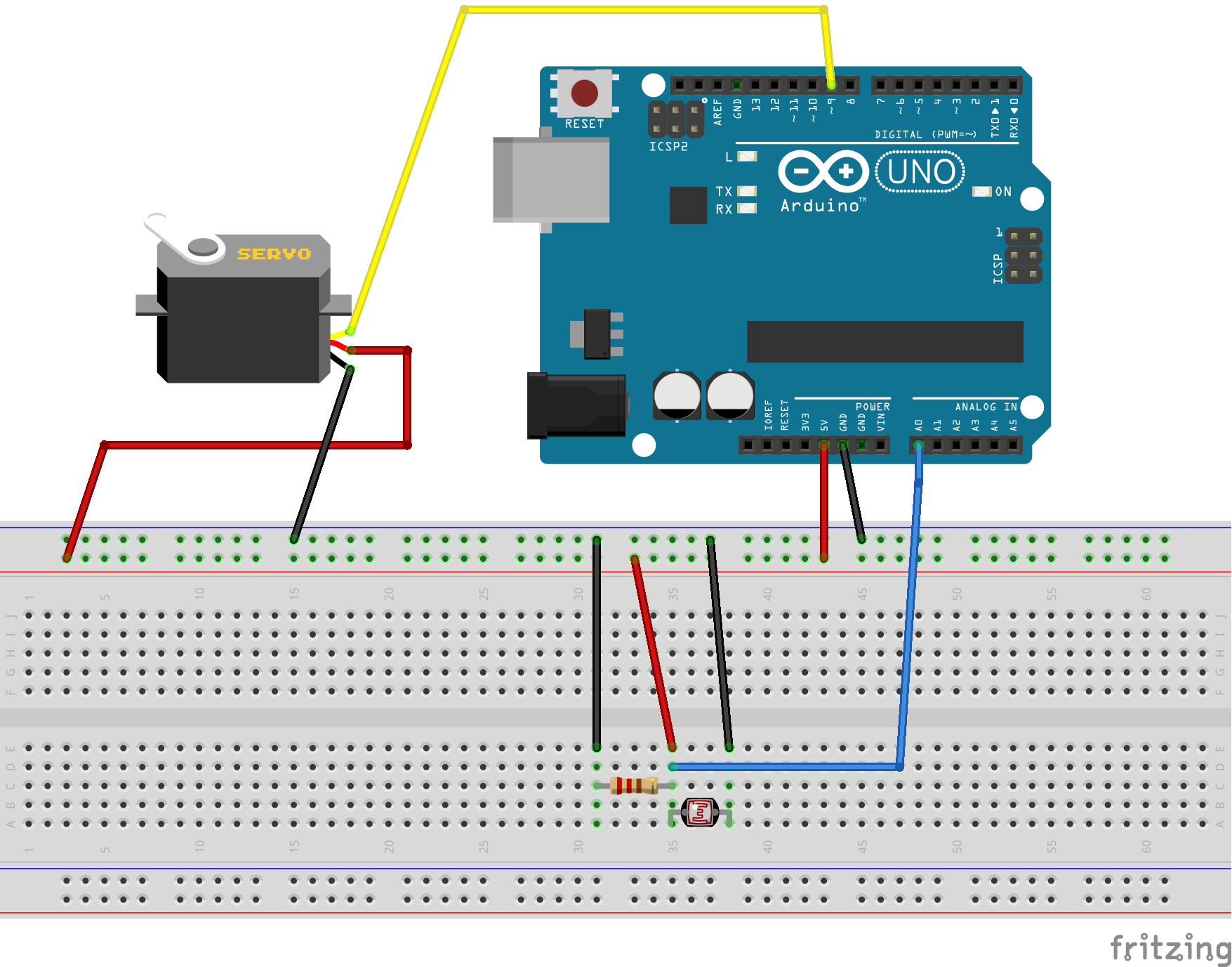
Physical Setup
Code
/*
Scholars' Lab Arduino Tutorials
Example Sketch 05
PHOTO RESISTOR & SERVO
Change the position of a servo motor based on the amount of light.
This sketch uses code from SparkFun Electronics sketches
for example circuit 6 and 8, version 2.0 6/2012/ MDG
This code is completely free for any use.
Visit http://learn.sparkfun.com/products/2 for SIK information.
Visit http://www.arduino.cc to learn about the Arduino.
Version 1.1/2016 AES
*/
// Include the Servo library
#include <Servo.h>
// Create constants for setting pins.
const int sensorPin = 0;
const int servoPin = 9;
// Set some contstants. Set the low at the highest value, it will auto adjust.
// Set the high at the lowest, it will also auto adjust.
int lightlevel, low = 1023, high = 0;
// Create servo control object
Servo servo;
void setup() {
servo.attach(servoPin);
Serial.begin(9600);
// calibrate for the first five seconds after program runs
while (millis() < 5000) {
// record the maximum sensor value
lightlevel = analogRead(sensorPin);
if (lightlevel > high) {
high = lightlevel;
}
// record the minimum sensor value
if (lightlevel < low) {
low = lightlevel;
}
}
}
void loop() {
int position; // The position of the servo, from 0 to 180 degrees
lightlevel = analogRead(sensorPin);
Serial.print("Light Level: ");
Serial.println(lightlevel);
// Auto adjust the high and low.
if ( lightlevel > high )
{
high = lightlevel;
}
if ( lightlevel < low )
{
low = lightlevel;
}
Serial.print("Highest = ");
Serial.println(high);
Serial.print("Lowest = ");
Serial.println(low);
// The map function allows us to map one range of numbers within another.
// the light sensor returns a value from 100 to 400 (or some other range
// depending on the amount of light available), but the servo needs a number
// between 0 and 180. The map function takes the light level (between 100
// and 400) and converts it to a number between 0 and 180. We add or subract
// 30 to make the difference between light and dark more dramatic.
lightlevel = map(lightlevel, low+30, high-30, 0, 180);
Serial.print("mapped light level = ");
Serial.println(lightlevel);
// The constrain function makes sure the value stays between 0 and 180 no
// matter what.
position = constrain(lightlevel, 0, 180);
Serial.print("Servo Position: ");
Serial.println(position);
servo.write(position); // Move the servo to the position
Serial.println("\n");\
//delay(2000);
}
Notes
- Seems to only work while plugged into a computer via USB cable. Does not work well with 4x AA batteries.